Introdução
Estamos em 2014 e o futuro é “agora”. Os engenheiros do Google têm trabalhado arduamente para tornar o virtual em realidade com projetos como o Google Glass e a sua mais recente tecnologia de mapeamento 3D, o Project Tango. Colocamos as mãos num dos kits de desenvolvimento de protótipos do Tango e mal podemos esperar para o abrir. Junte-se a nós para um pequeno Tango Delta (que é “teardown”, ou desmontagem analítica, para aqueles que não conhecem os seus alfabetos fonéticos) deste celular para desenvolvedores repleto de câmeras.
Mergulhe no nosso mundo virtual acompanhando as novidades tecnológicas no nosso Twitter, encontre amizades futuristas via Facebook, ou aprecie a fotografia instantânea que encontra no nosso Instagram.
O que você precisa
-
-
-
O Project Tango é, basicamente, um conjunto de câmera e sensores que roda em um celular Android. O Google não compartilhou muitas especificações além do conjunto de câmeras, mas encontramos um pouco mais:
-
Processador (CPU) Snapdragon 800 quad-core (até 2,3 GHz por núcleo) com 2 GB de memória RAM LPDDR3
-
64 GB de armazenamento interno, expansível via microSD
-
Tela LCD de 5"
-
Acelerômetro/giroscópio/bússola de 9 eixos
-
E, claro, o conjunto de detecção de profundidade: um projetor infravermelho, câmera traseira RGB/IR de 4 MP e câmera traseira olho de peixe com campo de visão de 180º
 Pergunte ao FixBot
Pergunte ao FixBot
-
-
-
Embora o Google possa estar com a cabeça nas nuvens (Cloud), eles garantiram a conectividade de hardware.
-
O Tango possui várias portas, todas livres daquelas irritantes tampas de plástico:
-
Micro HDMI
-
Micro-USB
-
USB 3.0
-
E uma forma de você se conectar emocionalmente, uma grade de microfone. Own.
-
-
-
Uma unha é a única ferramenta necessária para remover a tampa traseira do Tango e acessar a bateria. (Bem, um polegar também seria bem útil).
-
Tampa removida, bateria retirada. Simples. A capacidade intelectual de desenvolvimento do Tango foi aplicada ao que está dentro do celular, e não em bordas chanfradas sofisticadas ou estruturas monobloco de metal curvas.
-
Tango bears uma bateria robusta de 3000 mAh, pronta para que os desenvolvedores a levem ao limite.
-
-
-
Remover a bateria nos dá uma visão imediata da placa-mãe.
-
Mas, o mais importante, permite acesso rápido aos slots de SIM e microSD.
-
Embora essa construção signifique alguns passos extras para ejetar os cartões, também significa menos peças móveis e um mecanismo de ejeção que nunca falha.
-
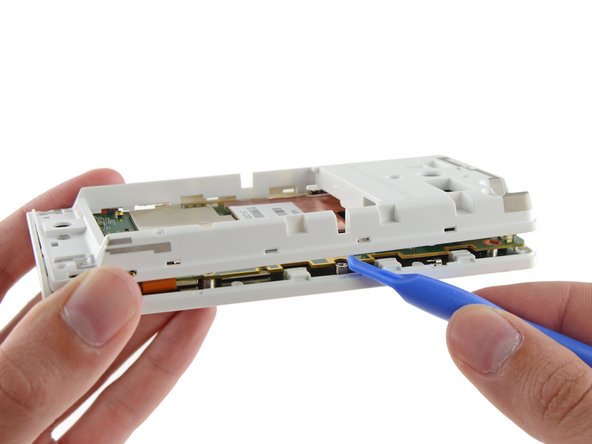
O giro de um parafuso, e a alavancagem de uma Ferramenta de abertura, e a
mina de ouroplaca-mãe é totalmente revelada. -
Nem um pingo de adesivo à vista — apenas um alto-falante com contatos à mola aninhado confortavelmente na estrutura central.
-
A estrutura central, fabricada pela Kuang Fa Plating Co, também abriga algumas antenas integradas, da mesma forma conectadas via práticos contatos à mola sem cabos.
-
-
-
Alguns conectores para desconectar, alguns adesivos para descolar e a placa-mãe está livre.
-
O único propósito do Tango na vida é trazer uma tecnologia empolgante que até agora estava limitada a consoles e rovers de Marte para uma plataforma móvel.
-
Sendo assim, ele não perde tempo com visuais chamativos ou um corpo fino. Ele simplesmente coloca sua tecnologia em uma caixa da maneira mais simples possível. Este é, de longe, um dos celulares mais fáceis de desmontar que já encontramos, dando ao Fairphone uma competição acirrada (ou, idealmente, algumas dicas de reparabilidade).
-
O conjunto do display de 5" usa um controlador de tela sensível ao toque Synaptics S3202 da série ClearPad 3.
-
-
-
-
Retiramos o alto-falante auricular do leve adesivo que o mantém em contato com seus terminais de pressão.
-
As marcações misteriosas neste dispositivo ultra novo e ultra personalizado continuam a nos escapar. Nossas buscas não encontram nada útil.
-
A seguir, duas câmeras deliciosas, servidas com o lado 'SUNNY' para cima.
-
A câmera de selfie tem um campo de visão (FOV) de 120º, o que é semelhante ao campo de visão do olho humano (com percepção de profundidade).
-
Então, o que estamos dizendo é que, quando você tira uma selfie, ela olha de volta para você.
-
A câmera 'padrão' de celular do Tango é um sensor RGB e infravermelho de 4 MP da OmniVision, que permite fotos e vídeos de alta resolução, bem como percepção de profundidade.
-
-
-
Mais uma que vai para o saco. Ou para a isca. Esta lente olho de peixe cobre um OmniVision CameraChip de baixo consumo.
-
A lente olho de peixe permite um campo de visão de 180º, enquanto o sensor de imagem equilibra a resolução e os quadros por segundo para gravar imagens em preto e branco para o rastreamento de movimento.
-
-
-
Uma grande parte em cobre fornece aterramento elétrico e dissipação térmica para o conjunto do sensor inferior. Alguma coisa deve esquentar bastante por aqui...
-
...E parece que encontramos o culpado: um projetor infravermelho. Bem no interior desta pequena caixa com tampa de vidro vive uma série de LEDs infravermelhos, alimentados por fios condutores robustos (para um smartphone).
-
-
-
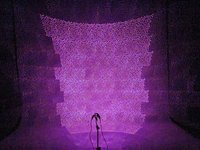
O Google não queria que ligássemos a nossa unidade, então tivemos que descobrir a nossa própria maneira de ligar o projetor infravermelho (IR).
-
Um pouco de energia aplicada com cuidado, uma câmera infravermelha caseira e pronto! Pontos brilhantes na parede da sala de fotos!
-
A grade brilhante de pontos mostra que o Tango funciona de forma semelhante ao Microsoft Kinect original, com uma grade de pontos capturada pelos sensores infravermelhos da câmera de 4 MP, criando um mapa de profundidade.
-
-
-
O que há de novo no Tango?
-
Memória RAM LPDDR3 de 2 GB da Elpida FA164A1PB, montada sobre um processador Qualcomm 8974 (Snapdragon 800)
-
Dois coprocessadores de visão computacional Myriad 1 Myriad 1 da Movidius.
-
Dois CIs de memória flash serial de baixa voltagem de 16 Mbit A25L016 A25L016 da AMIC
-
Dispositivo de rastreamento de movimento MEMS de 9 eixos MPU-9150 MPU-9150 (giroscópio/acelerômetro/bússola) da InvenSense
-
Módulo amplificador de potência multimodo e multibanda 77629 77629 da Skyworks para GSM/EDGE de banda quádrupla
-
SoC de sensor 3D Capri PS1200 PSX1200 PSX1200 da PrimeSense
-
-
-
A parte traseira da placa inclui:
-
Sensor de pressão Bosch Sensortec BMP180
-
Memória flash SanDisk SDIN7DP4-64G iNAND de 64 GB
-
IMU Bosch BMX055
-
CI de gerenciamento de energia Qualcomm PM8941 PM8941
-
CI de gerenciamento de energia Qualcomm PM8841 PM8841
-
-
-
Calma lá, o que é isto? Encontramos tecnologia nova inesperada no Tango.
-
Este parece ser o novo chip de imagem 3D Capri PS1200 SoC da PrimeSense, inesperado por alguns motivos:
-
Ainda no ano passado, a Apple comprou a PrimeSense, fabricante do hardware de visão 3D do Kinect. Especuladores assumiram que veríamos este novo hardware em um próximo dispositivo iOS, com a intenção de mapear espaços 3D. Parece que o Tango venceu a Apple na corrida com a tecnologia deles?
-
Também é interessante que a Movidius tem recebido bastante destaque ultimamente, como a sucessora de ultra baixo consumo ao trono 3D da PrimeSense, finalmente uma solução para dispositivos móveis. Então, o que a PrimeSense está fazendo aqui, ao lado da Movidius?
-
-
-
Índice de reparabilidade do Project Tango: 9 de 10 (10 é o mais fácil de reparar).
-
A bateria pode ser substituída em segundos sem nenhuma ferramenta.
-
Sete parafusos mantêm todo o dispositivo unido.
-
Vários componentes modulares podem ser substituídos de forma independente: alto-falantes, câmeras (todas as três!), projetor infravermelho e conjunto do display.
-
Alguns componentes permanecem soldados à placa-mãe, aumentando a dificuldade de substituição. Eles incluem o vibrador e as portas USB.
-
-























































Um agradecimento especial a esses tradutores:
100%

{kind=link}
{kind=link}
Translation Bot está nos ajudando a consertar o mundo! Quer contribuir?
Comece a traduzir ›
4Comentários do guia
"How do you build the depth map? It certainly looks to us like nearer dots are smaller, and farther dots are more expanded. Measure the size of the dot, and you've got its distance from the projector."
This doesn't make sense, since from the point of view of the camera, the dots will appear the same size (perspective).
http://en.wikipedia.org/wiki/Binocular_d...
If you have two images of the same subject from two vantage points you can calculate roughly the depth of the image. In this case it's slightly different since once of the "cameras" is actually a projector. So one viewpoint has a "perfect" image since it has the pattern hardcoded into its frame. You just need a camera then to record the projected image and extract a disparity map between the two. From that you can determine depth.
Project Tango is a nice idea, but needing a different device is a limiting factor for mass adoption. LazeeEye empowers existing smartphones to capture 3D images by using a laser illuminator hardware add-on and a stereo vision processing app. Check out the Kickstarter Campaign https://www.kickstarter.com/projects/332...
Hi guys,
Thanks for this helpful post.
There is a LED beside the standard camera, but it is not possible to use it. You can't either somehow access the flash light or take a normal picture with flash light on. Do you guys have any idea how to possibly use the flash light? Is there a way to turn it on?